Kali ini saya ingin share pengalaman saya membuat sebuah proyek fisika yang berhubungan dengan mekanika fluida, yaitu membuat sebuah lengan robot hidrolik sederhana dengan bahan bahan bekas yang masih bisa dipakai, seperti aqriliq bekas juga suntikan bekas pengisian tinta printer, untuk lebih jelasnya teman teman bisa mengikuti petunjuk petunjuk dibawah ini:
Bahan bahan yang perlu dipersiapkan:
1. Aqriliq bekas ukuran 4mm
2. Suntikan bekas, biasanya bekas pemakaian pengisian tinta priter, atau bisa membelinya yg baru di TOSERBA dekat rumah teman teman ( Jumlahnya sekitar 8 buah suntikan)
3. Selang waterpass ukurannya yang paling kecil, bisa teman teman dapatkan ditoko material terdekat
4. Lem alteko, kabel teas, isolasi doble tip
5. Peralatan pembantu gunting, cutter, gergaji mesin, dan hand Bor, mata bor 3mm
Langkah Awal Pembuatan :
1. Gambar disain yang nantinya akan digunakan sebagai mall yang akan ditempel pada aqriliq dan untuk digergaji, bisa menggunkana spidol dan penggaris, atau bisa menggunakan corel draw, atau autocad terserah teman teman bisanya yang mana, jika ingin membuat seperti yang saya buat silahkan teman teman dapat mendownloadnya disini:
a. Gambar mall 1 : Lengan1
b. Gambar mall 2 : lengan2
teman teman dapat membukanya dengan PDF ok

2. Setelah gambar disain dibuat kalian gunting mengikuti alur gambar dan ditempel pada aqriliq, (ini yang disebut dengan mall, teman teman mengerti sekarang….???)




3. Tahap selanjutnya setelah teman teman menempel mallnya pada aqriliq teman teman harus menggergajinya sesuai dengan alur dari mall tersebut, bisa dengan gergaji biasa, atau gergaji triplek, atau gergaji mesin biar cepat, tapi harus hati hati, jika butuh bantuan orang yang lebih tua jangan sungkan sungkan, karena ini sangat berbahaya




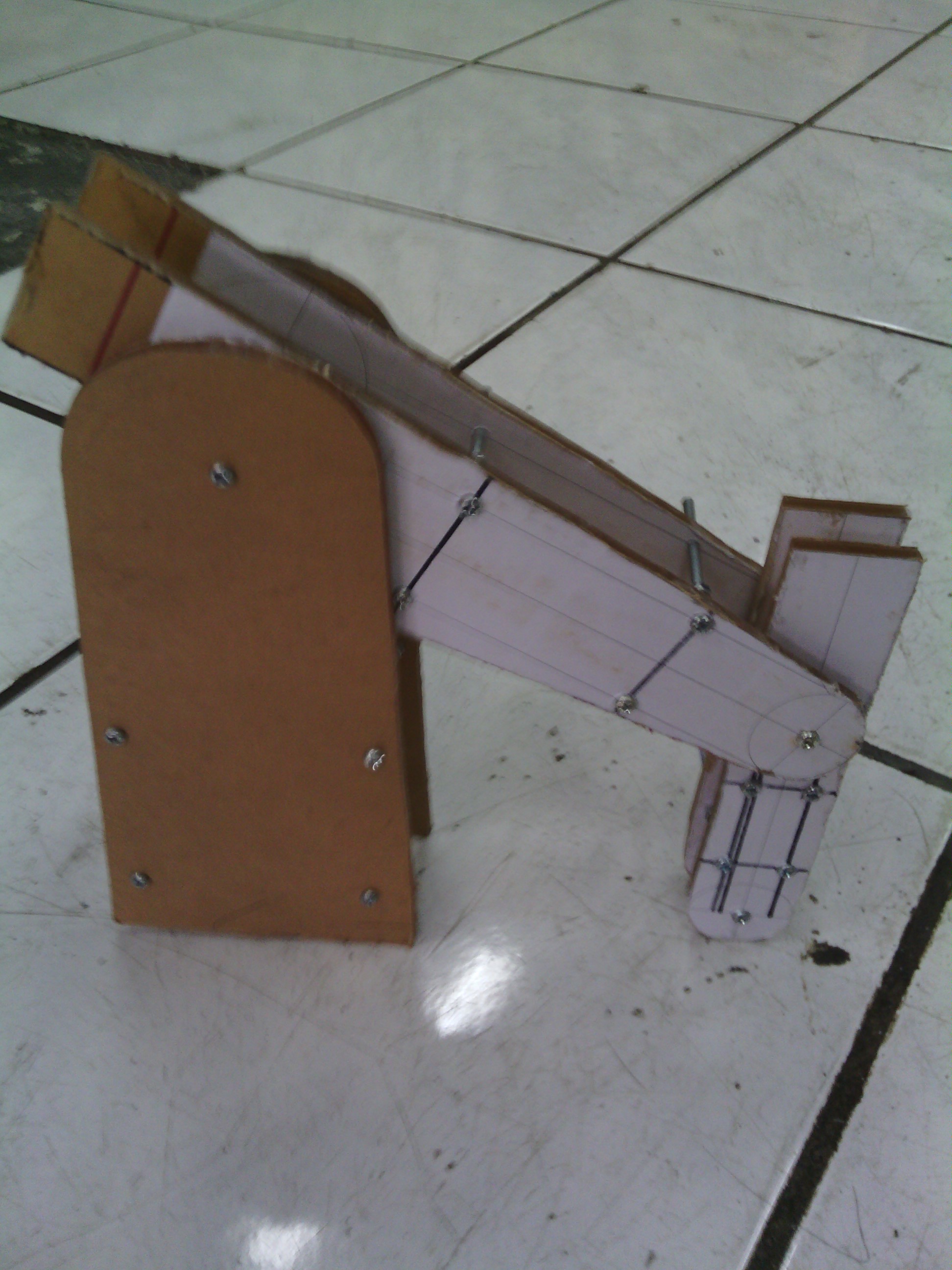
4. Selanjutnya siapkan mesin bor dan juga mata bor 3mm, lihat pada mall yang teman teman buat jangan lupa dipersiapkan tempat untuk melakukan pengeborannya ok, jika teman teman menggunakan gambar yang saya buat teman teman bisa melihat ada persilangan garis pada lingkaran kan…??? nah tepat dititik tengah tersebutlah harus dilakukan pengeboran jangan lupa ditambahkan persilangan garis yang lain untuk di lakukan pengeboran sebagai tempat baut yang digunakan untuk memperkokoh rangka nantinya. harus diingat pada saat pengeboran supaya mendapatkan lubang yang simetris dan sejajar antara body, pengeboran dilakukan dengan menggabungkan dua buah body yang sama, teman teman bisa lihat pada gambar, pada gambar teman teman bisa lihat saya melakukan pengeboran dengan menggabungkan kedua buah body yang sama atau seukuran bentuknya, jadi nanti kalian akan mendapatkan kedua lubang yang sejajar dan tegak lurus, jadi nanti body robot dapat berdiri dengan sempurna.




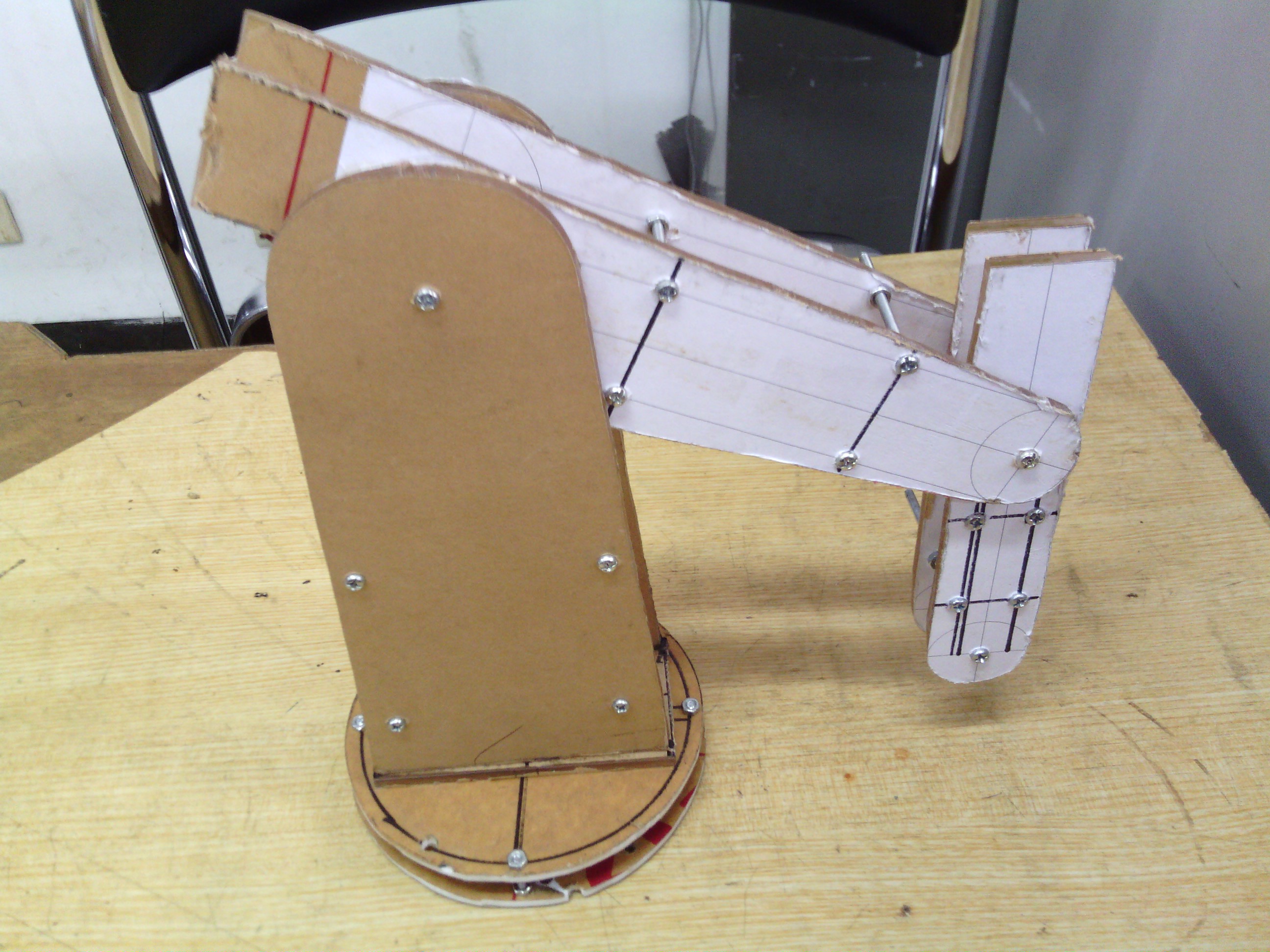
5. Perakitan robot secara keseluruhan, perhatikan teman teman harus melakukan pemasangan baut yang pas antar bodynya, jangan lupa harus pas dan juga kuat agar body robot dapat berdiri kokoh, dan juga untuk bagian yang bisa bergerak atau istilahnya (join) pastikan kalian memasang bautnya dengan benar agar bisa bergerak dengan penggunaan mur yang agak banyak, atau teman teman bisa menggunakan poros dan bering.




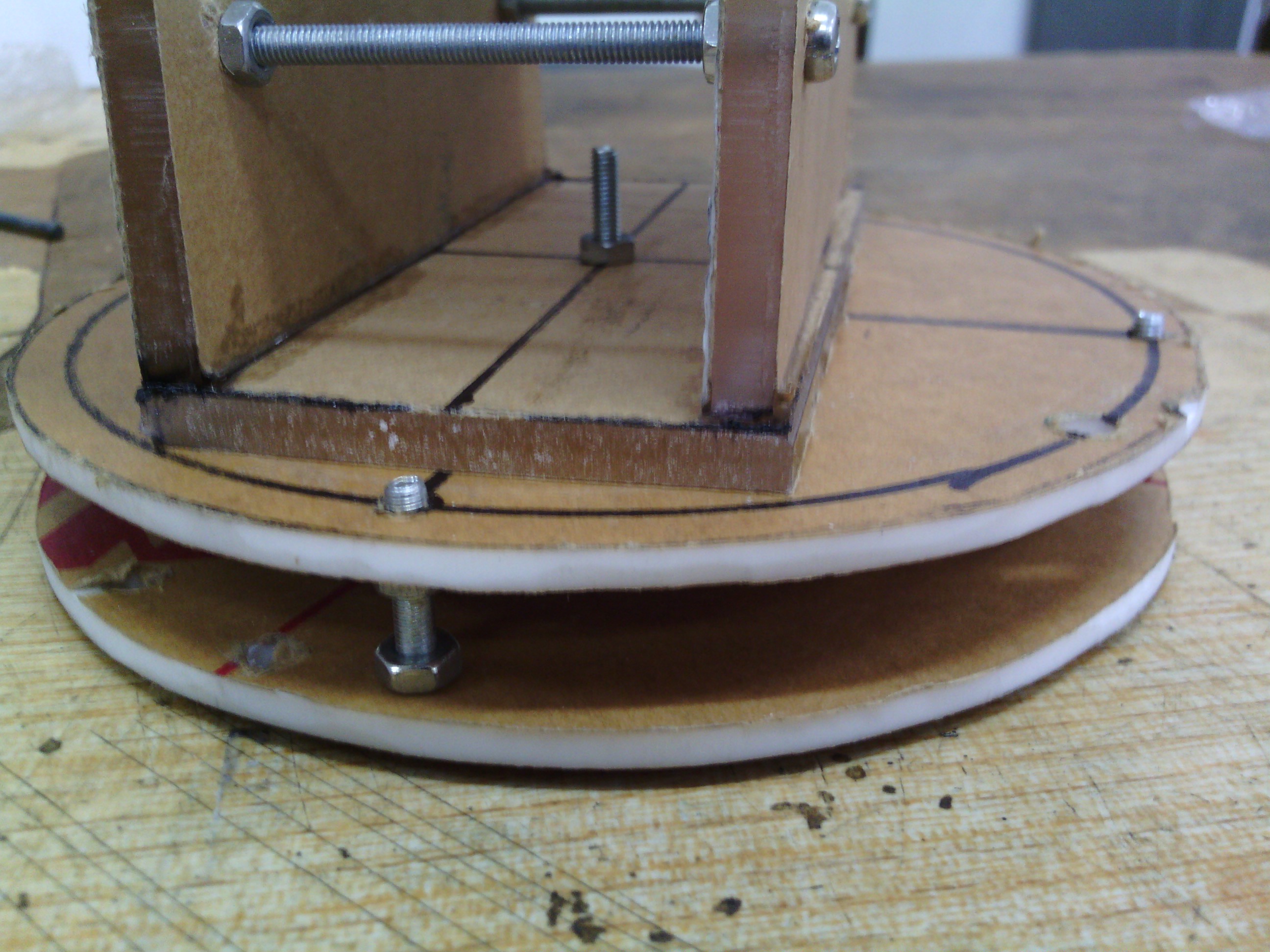
6. setelah robot berdiri dengan sempurnya langkah selanjutnya adalah membuat bagian bawah dari lengan robot agar dapat memperkokoh berdirinya lengan robot dan juga agar nantinya lengan robot dapat bergerak ke kiri dan ke kanan.



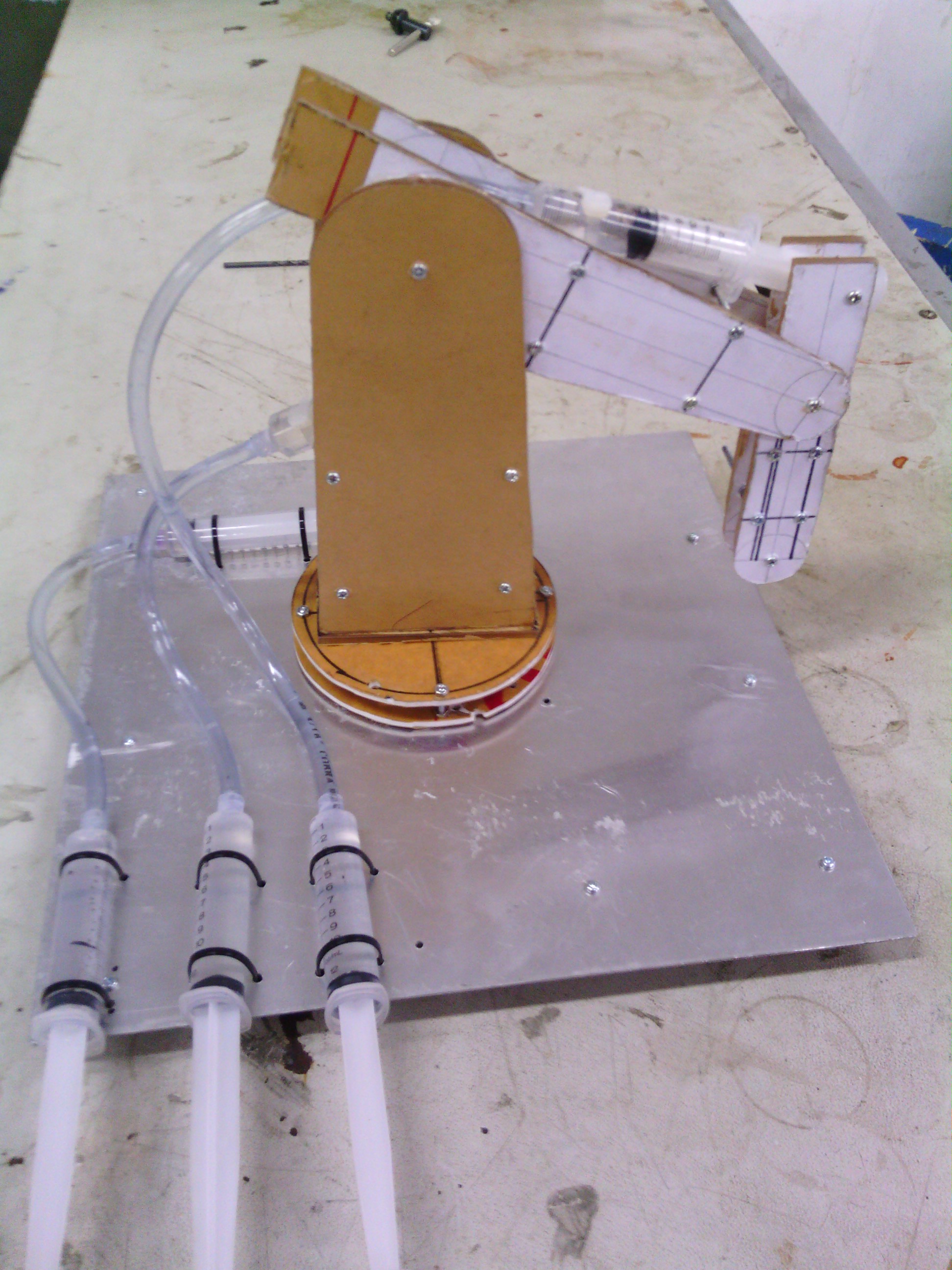
7. Setelah berdiri dengan baik lengan robotnya, teman teman langsung mempersiapkan pemasangan suntikannya pada body robot yang diletakan pada tiap pergerakan dari join lengan robot tersebut disinilah teman teman harus bisa memilih harus diletakan dimana…..????teman teman harus bisa mengira ngira posisinya sudah cocok atau belum sampai mendapatkan posisi yang sangat pas, sehingga antar join dapat bergerak dengan sempurna pada saat nantinya suntikannya sudah berisi air, pengikatnya teman teman bisa menggunkan kabel teast.




8. langkah selanjutnya adalah pemasangan selang waterpass, guntinglah selang waterpass sesuai kebutuhan lalu hubungkan selang ke masing masing ujung mulut suntikan, gunakan lem alteko untuk merekatkannya ( kenapa dilem alteko…..?????supaya udara dan air tidak keluar dari sela sela selang dan suntikan jadi nanti penekannya lebih sempurna). lalu setelah semua selang terinstal dengan baik, masukan air sedikit demi sedikit kedalam sambungan suntikan tersebut dengan cara, masukan air dalam suntikan pertama lalu tekan agar air masuk kedalam suntikan kedua lalu masukan air lagi dan tekan lagi sampai kedua suntikan terisi penuh dengan air, atau sesuai dengan disain dari teman teman sendiri (harus diingat untuk hasil yang sempurna diusahakan pada saat pengisian air posisi suntikan satu dan suntikan yang kedua tegak lurus ya…..!!!), oh iya satu lagi jangan sampai ada udara masuk sehingga menimbulkan gelembung udara didalam suntikan, jadi harus benar benar terlihat oleh teman teman tidak ada gelembung udara sama sekali, baru suntikan bisa digunakan untuk aktuator robot.




9. Selesai sudah pembuatan lengan robot hidroliknya, tinggal membuat griper yang cocok untuk membawa barang nanti akan saya tampilkan ditulisan berikutnya ya ditunggu….!!!!, selanjutnya teman teman dapat mencobanya dengan menekan suntikannya satu persatu nanti teman teman mendapatkan gerakan lengan robot yang smoot naik dan turun, geser kekanan dan kekiri.
 | This email is free from viruses and malware because avast! Antivirus protection is active. |